Steady-state Analysis of Discrete Systems
线性系统稳态误差计算
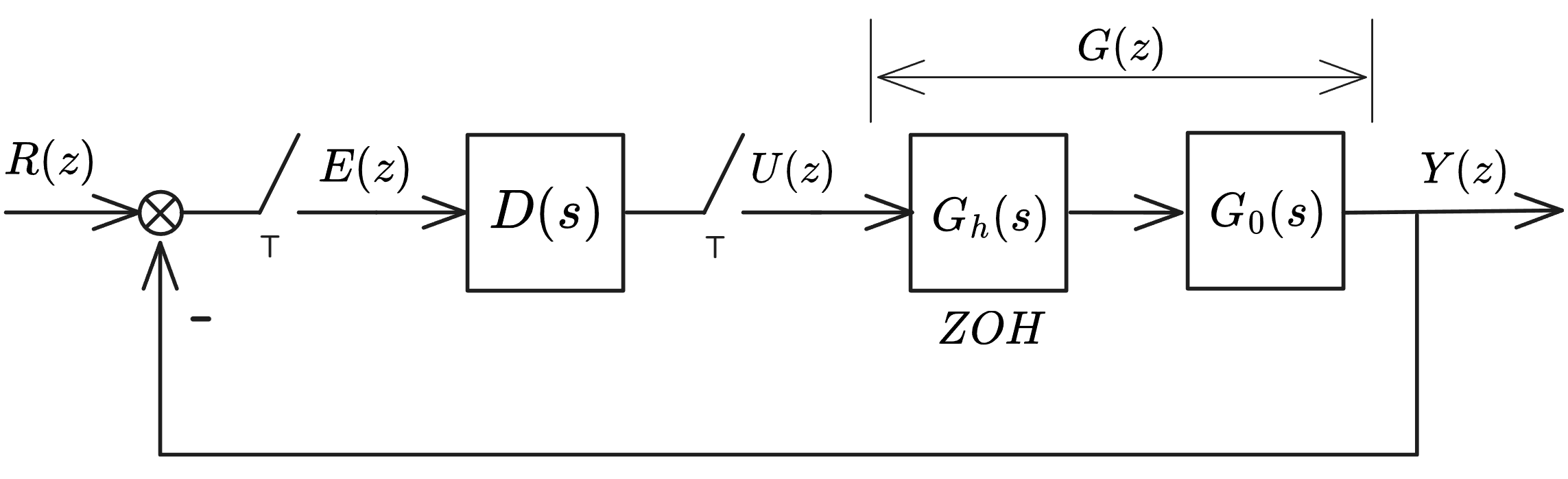
误差传递函数:误差信号与输入信号之比 Φk(z) 为开环传递函数,Φe(z) 为误差传递函数:
根据终值定理,稳态误差表示为:
位置误差系数:
速度误差系数:
加速度误差系数: